A little backstory…
I’m pretty sure it was in 2018 that godoloju got me an Anet A8 3D printer for my birthday/Xmas. Nice guy huh! It took roughly 8 hours to get it put together and printing my first print. V1.0.
At the time, these were kinda known to start fires. The connection on the bed would sometimes short, and on an even more rare occasion, throw a spark. But it was a thing.
Not wanting to burn down my house, I quickly did some research into different solutions and went about getting them installed. I printed cable chains, belt adjusters, and frame reinforcements. I bought mosfets, a higher quality power supply, and a plug/switch combo.. Just to make it a bit more, well.. more. (the volt meter is just for shits and giggles) I once estimated it at roughly 200 hours worth of work, and pushing 1000 hours if you include all of the print time.
Then, there was the VR incident of 2019.
I had set my VR up before getting the printer. The printer ended up in the ‘play zone’ for the VR. Then, I was letting a particularly long friend experience VR for the first time. While violently throwing a robots head at another robot, my friend managed to hook and throw my 3D printer across the room.
The acrylic frame exploded.
I couldn’t look at it for a while.
About 6 months ago, I set about adding the metal frame, or the AM8 conversion. Same printer, but extruded aluminum frame. I used as many parts from the V1.0 as possible, but I did replace the thread rods and the X guide rods.
The original bearings from the Anet A8 kit had been wearing grooves into the guide rods. After a bit of research, many we’re recommending these plastic ‘sliders’ (not sure what else to call them). I’ll update this sometime in the future and give some type of review of them. But after 50ish hours with them installed, they seem to be working great.
Manual leveling is just tedious enough that it was pissing me off. It seemed to fluctuate some between every print. I do remember at one point I went like 8 prints without needing to re-do the leveling. So, one of the other goals at this point was to get auto bed leveling working. I had purchased a capacitive and inductive sensors, and had planned on using the capacitive as it was supposed to work with glass. However, I was finding information on several different ways that it needed to be connected. One of which required a daughter board. I ended going with the inductive because it’s setup was basically plug and play.
Well… there isn’t a ton of configuration you have to do for the sensor itself. You do have to enable and configure auto bed leveling in the firmware and get the sensor mounted in just the right spot. There are guide out there suggesting a ‘correct way’ of getting your hotend and sensor aligned properly. I started this way, but ended up making a type of jig. Allowing me to put the tip of the hotend in the correct place, and then set the jig under the sensor, and then tightening it up. I’ve used this method twice now, with success.
- AM8 Build Guide
- AM8 Frame
- AM8 Thingiverse Link
- Anet A8 Build Instructions
- Inline Voltmeter
- Power Supply
- Mosfets
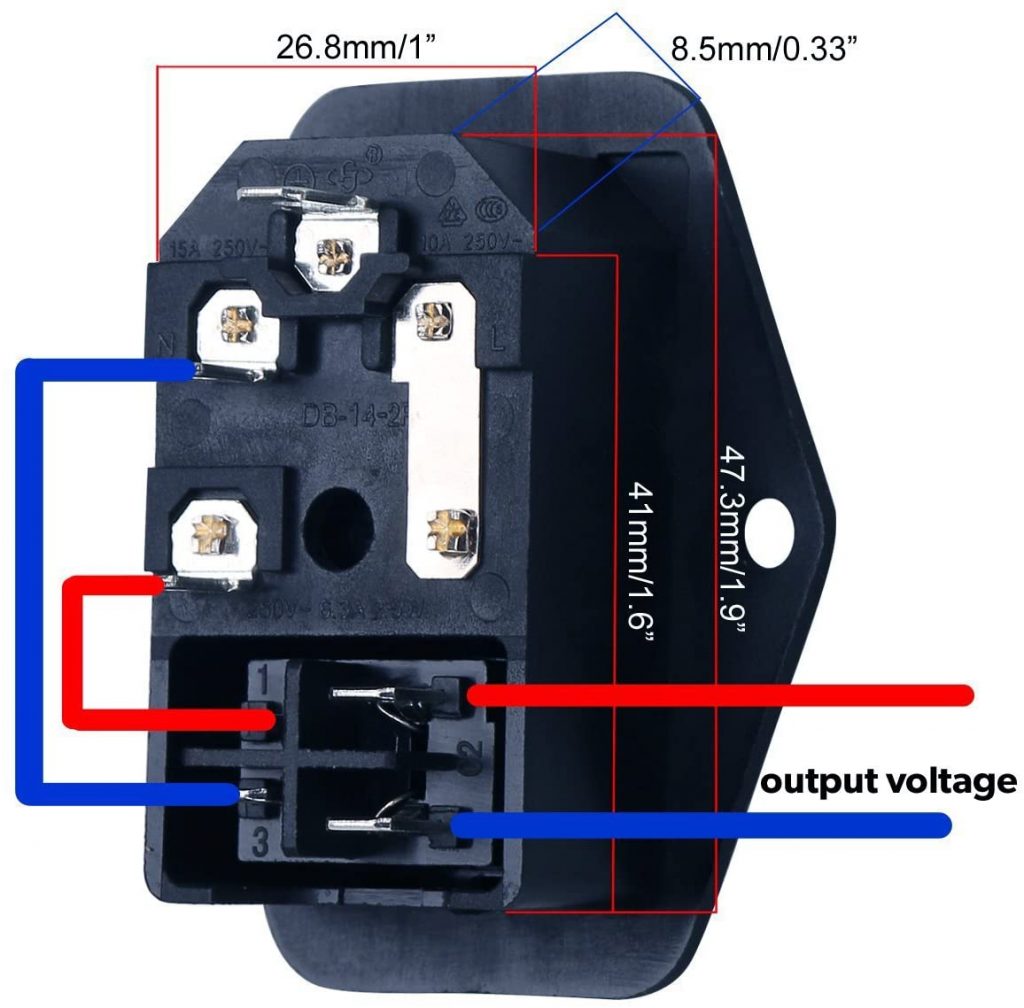
- Plug & Power Switch
- Level Sensor